
重機の代表格である油圧ショベル。
大きいし沢山の部品でできていて色々な動きができる機械。
そんな機械の動く仕組みなんて難しくて全然理解できないんじゃないかと思ってませんか?
今回はそんな重機の走行動作の仕組みを分かりやすく説明していきます。
私は大手重機メーカーで20年間油圧ショベルの設計に従事してきました。どんな部品を使っているか、どんな仕組みなのかを理解しております。
この記事では油圧ショベルの設計者が油圧ショベルの走行動作の仕組みをわかりやすく説明します。
この記事を読むと油圧ショベルの走行動作の仕組みを簡単に理解できて他の人にも説明してあげることができちゃいます。
結論は、上部旋回体に配置されたエンジンで発生させた動力を油圧ポンプで油圧パワーに変換し、それをセンタージョイントを介し下部走行体に配置された走行モーターへ伝達し、走行装置とそこに連結されたスプロケットにより、クローラを回すことで油圧ショベルが前進および後進することができる。
走行動作とは
●走行モーターを介してクローラを回転させること
油圧ショベルの走行は油圧の力をモーターに伝え、更にクローラを回転させることで機械を移動する力に変換します。
その過程で減速させたり、油の量を調整することはあっても基本はいたってシンプルです。
※ホイール(タイヤ)式のショベルもありますが、本記事ではクローラ式の油圧ショベルについて記載します。
走行するための仕組み
全体構成
●クローラがぐるぐる回転
ではまず下記の油圧ショベルの説明図をご覧ください。
大きく分けると動力供給部、動力伝達分配部、駆動部、従動部、ガイドの機能部に分類されます。
この中で走行動作に参加する主な部品は油圧ポンプ、コントロールバルブ、センタージョイント、走行装置、スプロケット、クローラ、フロントアイドラー、アジャスター、上ローラー、下ローラーです。

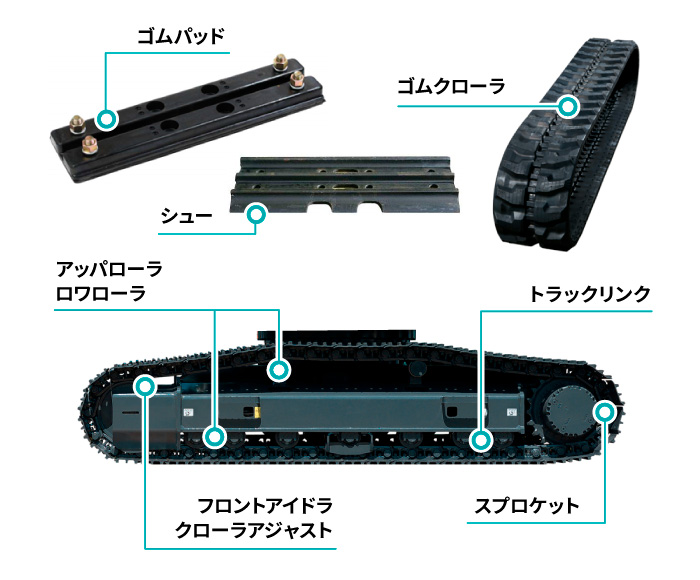
走行動作とは、乱暴にざっくり言ってしまうと、ポンプの供給動力を走行装置に伝達し、クローラをぐるぐる回転させることです。
ここで疑問となるのは、
- 動力源は?
- 力の伝達方法は?
- 速度や力の制御方法は?
では上記3つの問いに対して以降で説明していきます。
動力源
油圧ショベルの力の源は”油圧”です
エンジンに連結された油圧ポンプが発生させる油の力”油圧”が走行動作の動力源になります。この油圧を利用して油圧モータを回転させます。
力の伝達方法
力の伝達方法には2種類あります。油圧と機械式です。
油圧による力の伝達
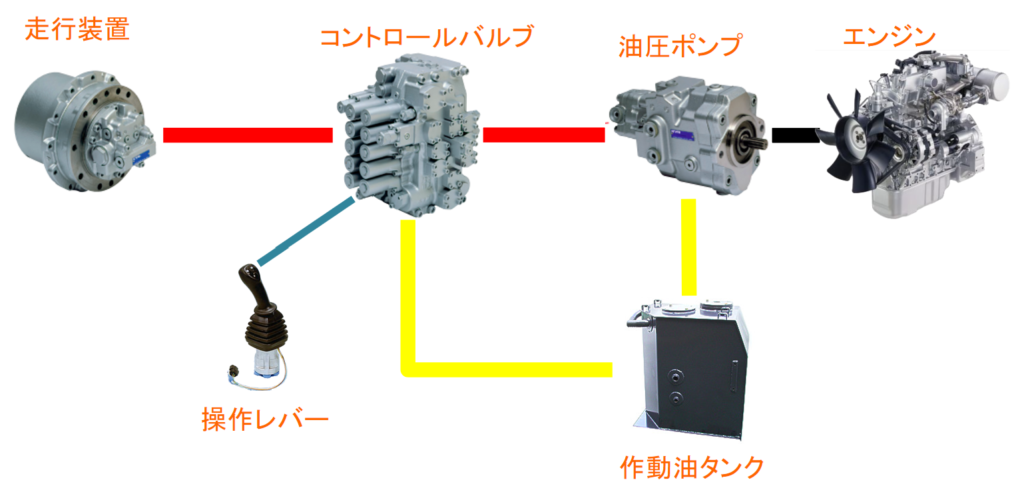
油圧というのはとても便利で、油圧ポンプから油圧モータまで遠く離れていても配管を接続するだけで力の伝達ができるのは油圧の利点です。
油圧ポンプで発生させた高圧の油を油圧ホースやパイプを介して送り、走行装置に取り付けられている油圧モータを回転させます。
機械式による力の伝達
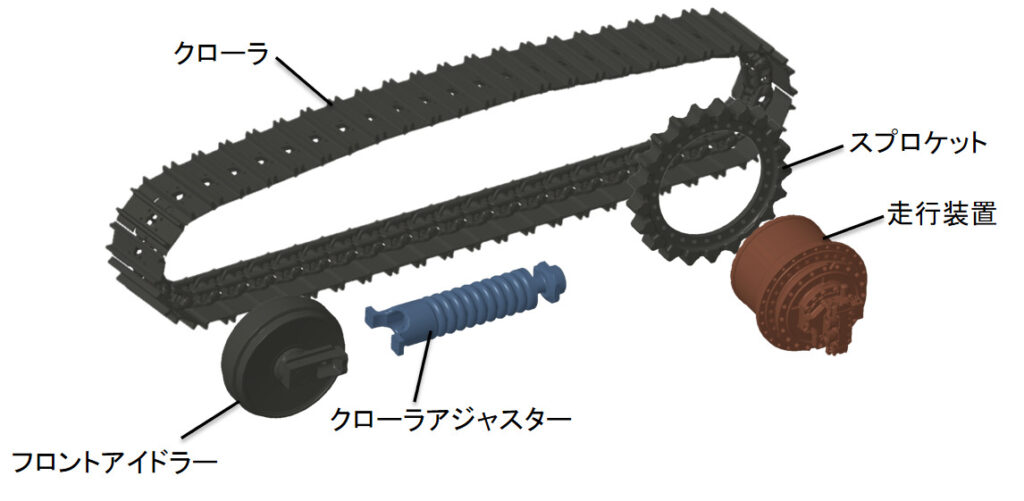
機械式の動力伝達方法といっても色々ありますが、油圧ショベルの走行システムでいう機械式の伝達方式としては主に歯車(ギヤ)による方式です。
供給された油圧により油圧モータが回転しますが、その回転力を走行装置内の減速機へ伝達し、更に減速機からスプロケット、そして最終的にクローラ(トラックリンク)へと歯車により伝達されていきます。
減速機はモーターの軸の回転数を減速し、力を増幅させています。
また、走行モータと減速機には停車用のブレーキが備わっております。
ブレーキも機械式でディスクブレーキとなっています。
オペレーターが走行の操作をした時に油圧の力でブレーキを解除し、走行の操作をやめた時にブレーキ解除の油圧が失われ、バネの力によりブレーキが戻され停車を可能としています。
速度や力の制御方法
以下に速度と力に分けて説明します。
速度の制御方法
走行の速度を変えるとは、走行モータの回転数を変えることであり、その為には走行モータに供給する油の流量を調整する必要がある。
その為には(1)油圧ポンプからの供給する流量を調整する。(2)コントロールバルブで走行モータへ分ける流量を調整する。という制御をする必要がある。
メーカーやモデルにより油圧システムの方式に違いがあり厳密には違うのだが、基本的にはオペレーターが操作レバーを動かした量に応じて油圧ポンプから供給する油の量が変化し、且つコントロールバルブが走行モータへ分ける流量も同様に変化する。
前進/後進方向の切り替えについては、オペレーターが操作レバーを操作した方向に応じて、コントロールバルブが走行モータを前進する方へ油を流すか後進する方向へ油を流すのかを切り換える。
またオペレーターが走行速度の切り替えスイッチを高速⇔低速で切り替えることにより走行モーターの押しのけ容積を小容量⇔大容量へ切り替え走行速度を切り換えることができる。
走行動作は前進、後進のみでなく右折、左折、スピンターンなどの動作も可能である。オペレーターが操作レバーの操作を通じて、右側の走行モーターと左側の走行モーターの回転速度や回転方向を変更することでそれらの動作を実現する。
力の制御方法
走行の力を変えるとは、走行モータが発生させるトルクをかえることである。走行モータの押しのけ容積は一定(高速/低速の切り替えはできるが)であるので、トルクを変える=圧力を変えるということになる。
走行モータの圧力は負荷に応じて変わる=加わる負荷以上の力は発生しない。これはあなたが100kgのおもりを持ち上げる時に100kg以上の力を出さないことを想像すれば分かると思う。(ただしこれは静的な話であり、加速する時には負荷+加速度分の力が加わることにはなる。これを考慮するとポンプの流量を変化させると力も変化するとも言える。)
走行の最大の力は走行システム内のリリーフバルブと呼ばれる安全弁の設定圧力で決まっており、その圧力を超えることはない(安全弁が設定圧力を超えた分の圧力を作動油タンクへ逃がすため)。
まとめ
油圧ショベルの走行システムは、オペレーターが操作レバーを操作することにより、上部旋回体に配置されたエンジンで発生させた動力を油圧ポンプで油圧パワーに変換し、それをセンタージョイントを介し下部走行体に配置された走行モーターへ伝達し、減速機で力を増幅し、そこに連結されたスプロケットにより、クローラを回すことで油圧ショベルが前進および後進することができる。
本記事で油圧ショベルの走行動作の仕組みの大枠が理解できたと思います。これをきっかけに少しでも油圧ショベルに興味をもってもらえれば幸いです。
本ブログでは重機の代表格である油圧ショベルの基本的な仕組みについて詳しく掲載しているので興味があればご覧になってください↓↓↓



コメント